Сначала давайте поймем разницу между октокоптером и квадракоптером. Помимо названия, это еще и количество двигателей на направляющих. Т.е. квадрокоптер -четыре двигателя, октокоптер — восемь. Так же это справедливо это и для гексакоптера — шесть, трикоптера — три и т.д. Если направляющих, например, четыре (Х), а двигателей восемь, то это все равно октокоптер, но обозначается как Х8. Т.е. на четырех направляющих, восемь двигателей.
Сначала давайте поймем разницу между октокоптером и квадракоптером. Помимо названия, это еще и количество двигателей на направляющих. Т.е. квадрокоптер -четыре двигателя, октокоптер — восемь. Так же это справедливо это и для гексакоптера — шесть, трикоптера — три и т.д. Если направляющих, например, четыре (Х), а двигателей восемь, то это все равно октокоптер, но обозначается как Х8. Т.е. на четырех направляющих, восемь двигателей.
В основном цифрами с приставкой коптер называют летательные аппараты, управляемые по радиосигналу оператора с земли. Студент из Индии решил пойти дальше и сделать октокоптер способный поднять в воздух человека. Это не дешевый проект. Финансирование его взяло на себя учебное заведение.
Инструменты и материалы:
-Двигатели Turnigy CA170 Motors — 8 шт;
— Контроллер Turnigy Fatboy 300A — 4 шт;
— Контроллер Turnigy 200A HV — 4 шт;
— Приемо-передатчик Hitech XG11 Tx / Rx ;
-Полетный контроллер DJI A3 Pro;
-Полетный контроллер DJI Naza M V2;
-Аккумулятор Zippy 22.2V 5Ah 40C LiPo — 16 шт;
-Зарядное устройство 6s LiPo Charger;
-Разъемы XT150 — 50 шт;
-Провод 8AWG Sillicone Wire — 10 метров;
-Сервоприводы;
-Мяч для игры в сквош (Squash Balls) — 4 шт;
-Лист МДФ 25см х 50см х 2мм;
-Дрель;
-Угловая шлифовальная машина;
-Отвертки;
-Гаечные ключи;
-Плоскогубцы;
-Лазерный резак или ленточная пила;
-Ассортимент гаек 4мм, 6мм и 8мм, болтов и шайб;
-Горелка;
-Светодиод;
-Паяльные принадлежности;
— 2 и 3 мм стальная проволока;
-Талреп винтовой 100мм-200мм — 40 шт;
— 40 крючков и рым-болтов;
-Тахометр Turnigy RPM;
-Анализатор мощности (Turnigy Wattmeter / Ampmeter);
-Контроллер батареи;
-Алюминиевые профильные трубы;
-Алюминиевая пластина;
-Двусторонний скотч;
-Сварочный аппарат;
-Рулетка;
-Компьютер с Fusion 360;
-Батарея 11,1 В 2200 мАч LiPo 30C;
-Плотная ткань 1,2м х 1,2м;
-Прочная нить и игла;
-Ремни безопасности;
Шаг первый: проектирование
При разработке пилотируемого октокоптера мастер рассматривал различные варианты конфигурации, и X8 и Н, и Т, но пришел к выводу, что самой оптимальной, по разным причинам, будет конструкция октокоптера, по традиционной схеме.
Затем нужно было выяснить, каким должен быть размер октокоптера. Расчеты были произведены на примере CAD-моделей на Fusion 360. В расчетах учитывались уже имеющиеся винты. Оптимальным оказался диаметр три метра, высота один метр. Внутренняя корзина, для человека 55х55 см.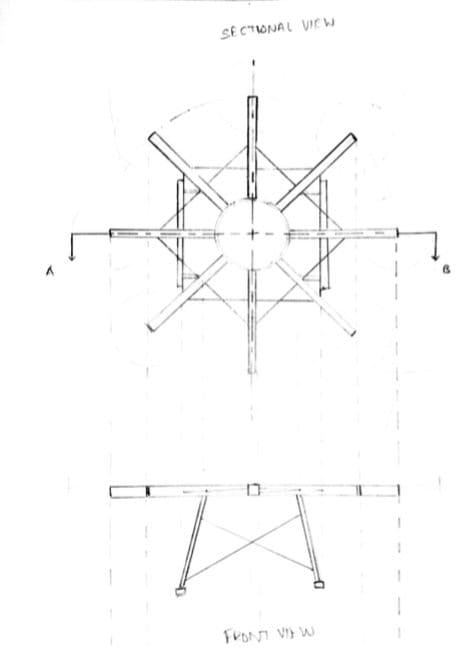

 Шаг второй: корзина
Шаг второй: корзина
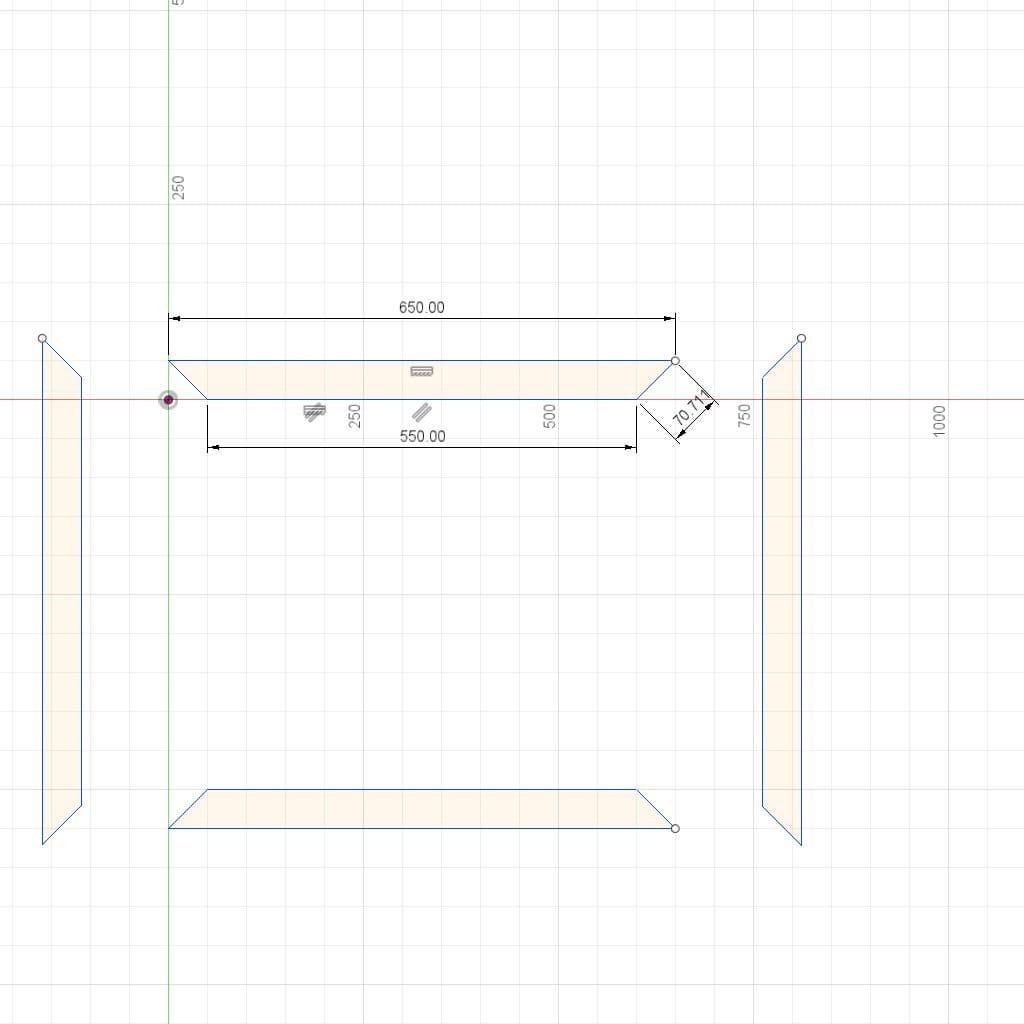
Рама была сварена из алюминиевого квадратного профиля с полкой 50 мм и толщиной стенки 2 мм.
Профиль был разрезан и сварен. Швы зачищены.


 Шаг третий: монтажные пластины
Шаг третий: монтажные пластины
Для кронштейнов мастер использовал алюминиевые пластины 1,5 мм. Всего кронштейнов восемь, четыре по углам, и четыре по середине рамки. Длина плеча кронштейна и опорной части по 15 см. Кронштейны были спроектированы в Fusion 360. Пластины были вырезаны фрезой. В них просверлены крепежные отверстия. Затем кронштейны были приварены к рамке.






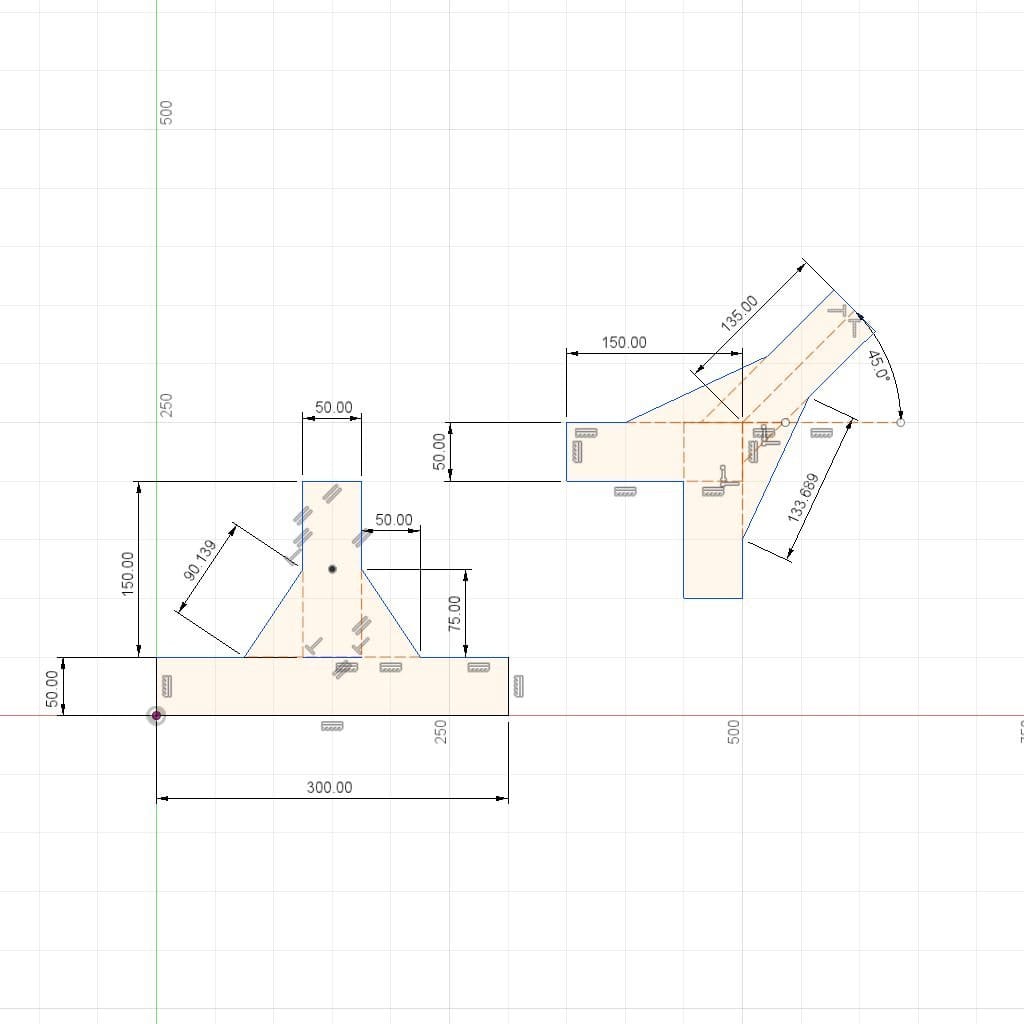
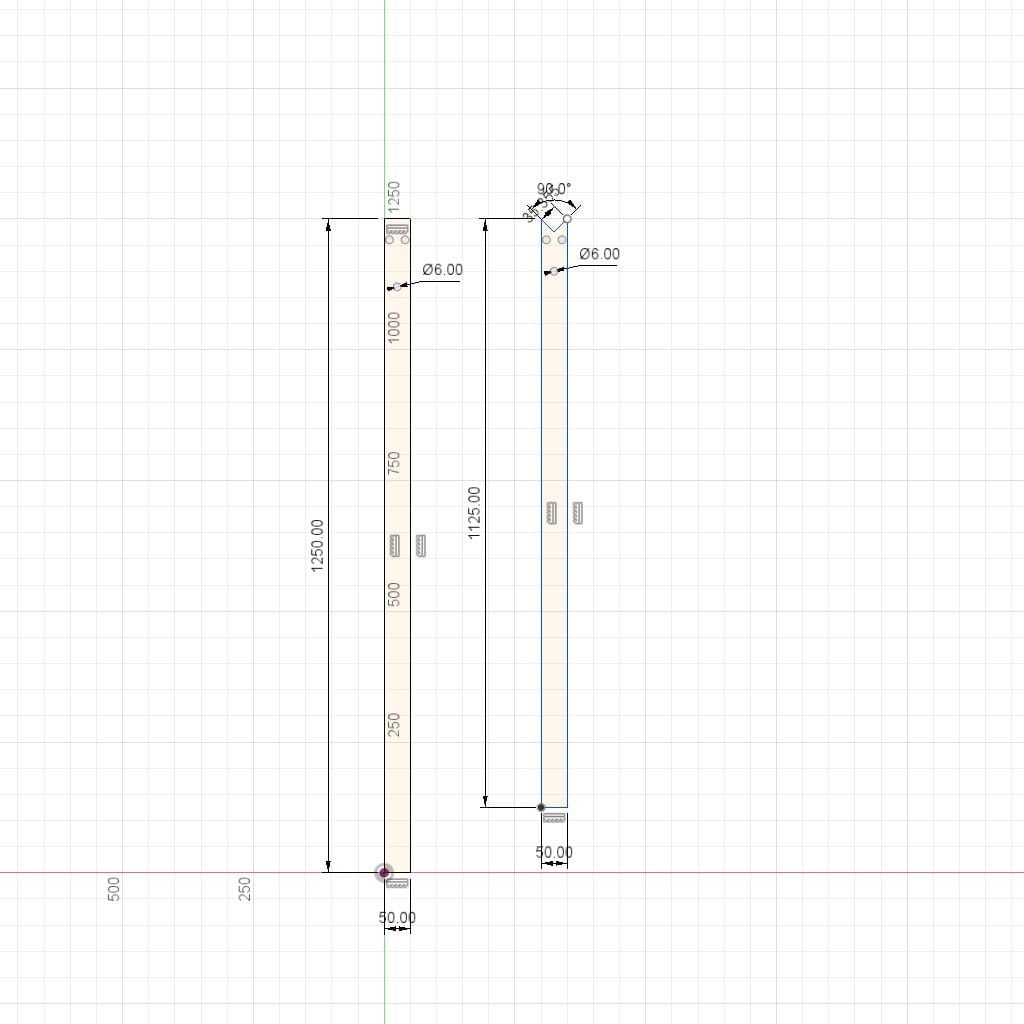
Эти профиля крепятся к кронштейнам и на их концах устанавливаются двигатели. Профили квадратные, 50 Х 50 см, и имеют разную длину. По углам крепятся профили длинной 112,5 см. По бокам профиль 125 см. На угловых профилях делается вырез под углом 45 градусов. Нужно, что бы его торец прилегал к плоскости угла.
Для крепления профилей к кронштейнам мастер сверлит отверстия под болты.


 Шаг пятый: крепление двигателя
Шаг пятый: крепление двигателя
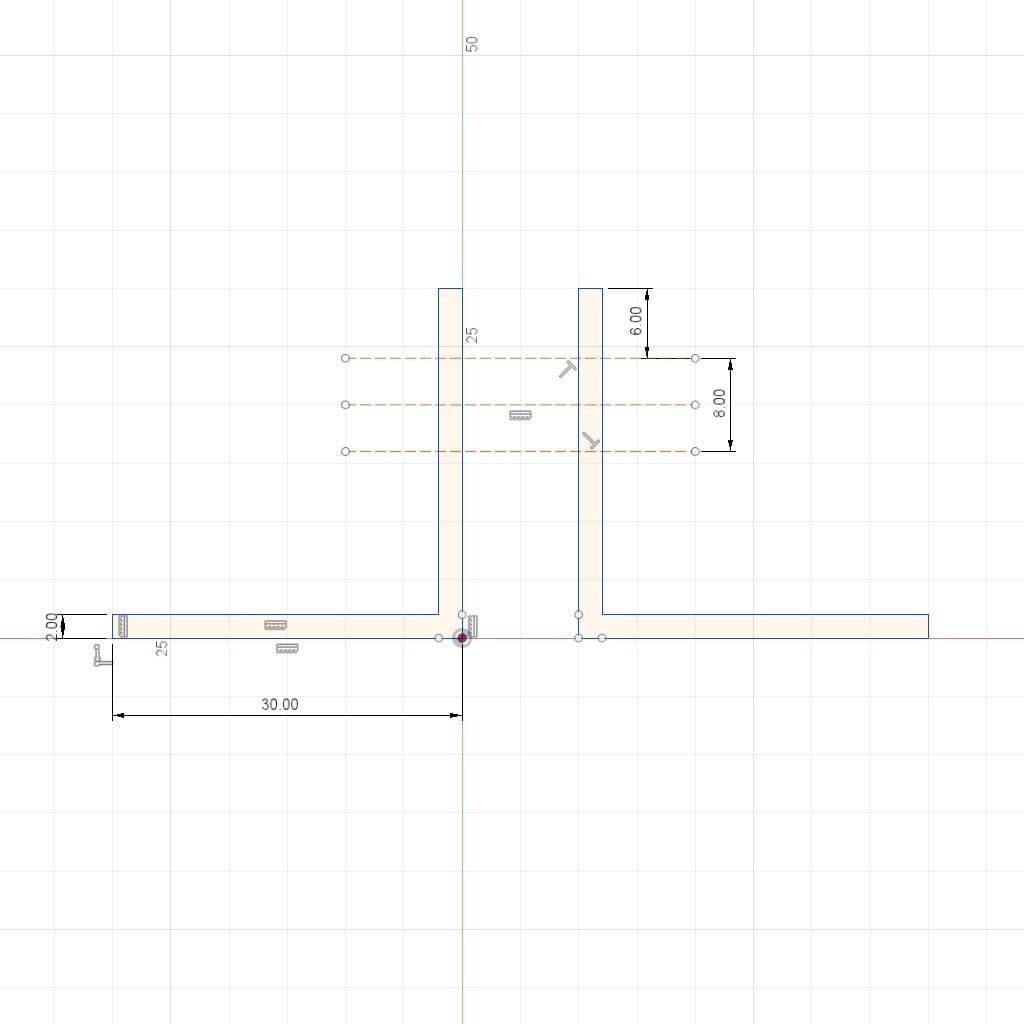
Двигатели прикручиваются к алюминиевой квадратной пластине. Снизу пластины, параллельно друг другу, прикручиваются два уголка. Расстояние между ними равно ширине профиля. Дальше пластина с двигателем устанавливается на профиль, сверлятся крепежные отверстия и все скручивается болтами.



 Шаг шестой: шасси
Шаг шестой: шасси
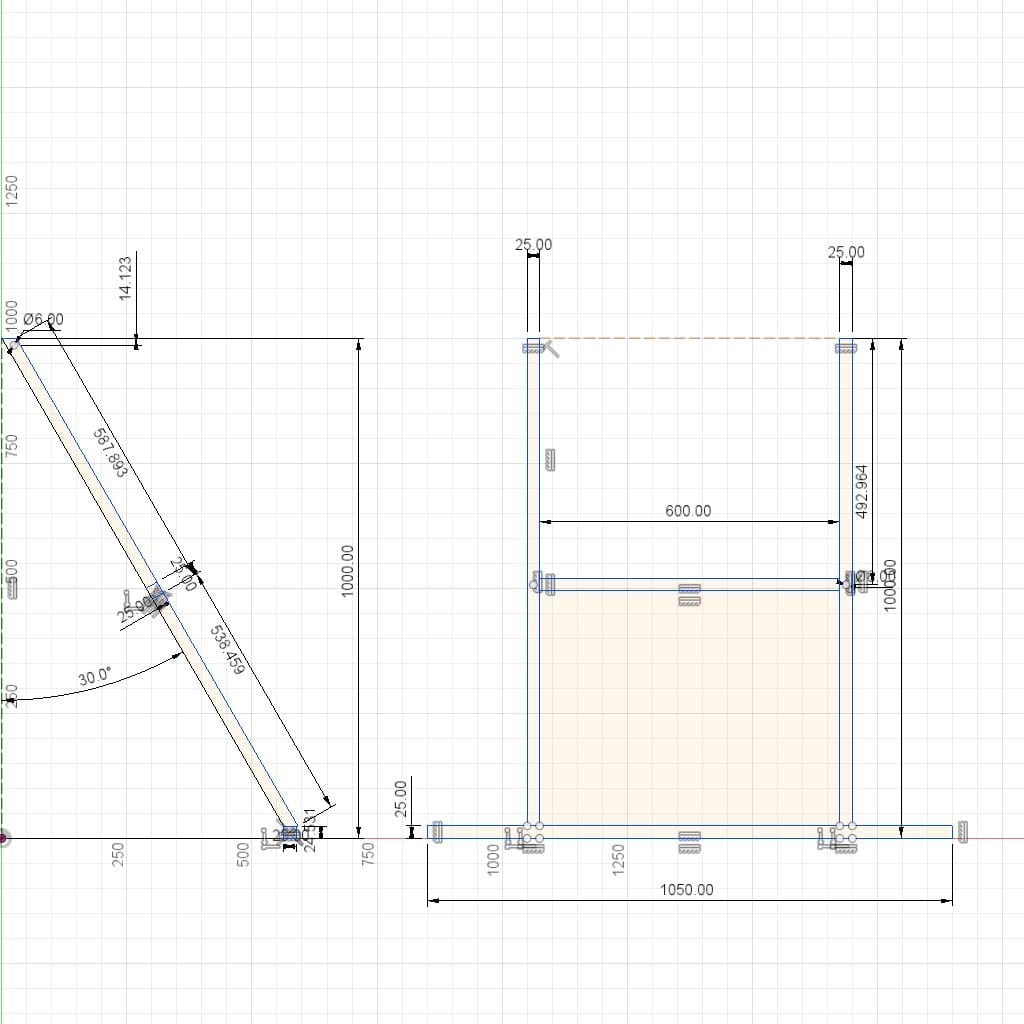
Шасси было изготовлено из алюминиевых профилей 25 x 25 мм и толщиной 3 мм. Все детали были сварены, а их размеры можно увидеть на фото. Идея состояла в том, чтобы установить шасси наружу от корзины под углом 30 градусов. Для предотвращения поломки шасси, между ними натягиваются поддерживающие тросы.

 Шаг седьмой: поддержка несущих профилей
Шаг седьмой: поддержка несущих профилей
После установки двигателей несущие профиля начали изгибаться. Тогда мастер попробовал запустить двигатель, и выяснил, что профили «гуляют». Нужно было усиливать конструкцию.
Добавление пластин добавило бы слишком большой вес конструкции. Тогда мастер решил сделать V-образную конструкцию от корзины вниз. К ее нижней части крепятся тросы. Другие концы тросов крепятся к кронштейнам по середине несущих профилей. Тросы натягиваются с помощью тальрепа. Таким образом конструкция приобретает жесткость.















 Шаг восьмой: подключение
Шаг восьмой: подключение
Сначала мастер припаивает на концы проводов разъемы.

Полетный контроллеры IMU DJI A3 очень чувствительны к помехам от металлов, и мастер не смог настроить систему из-за помех. В итоге A3 мастер заменил на Naza M V2, у которого была похожая схема подключения. Naza M V2 работал очень надежно.
Затем мастер подключает батареи. На каждом несущем профиле устанавливается по две батареи 22,2 В соединенных последовательно.

 Шаг девятый: сиденье пилота
Шаг девятый: сиденье пилота
Сиденье было сшито из прочной ткани. Так же на пилота надевается страховочный пояс, который крепится к рамке, и шлем.




 Шаг десятый: первый полет
Шаг десятый: первый полет
Перед полетом пилота на октокоптере были проведены несколько испытаний с мешком с песком, а затем с макетом человека. При полете моделировались различные ситуации от потери управления, до порыва ветра.
После всех испытаний наконец то в воздух поднялся пилот.




 Перед полетом необходимо произвести следующие действия.
Перед полетом необходимо произвести следующие действия.
Проверить затяжку болтов, тросов, надежность крепления двигателей.
Проверить правильность электромонтажа.
Проверить легкость вращения винтов.
Убедится, что все ESC установлены в выключенное положение.
Убедитесь, что все батареи надежно закреплены и заряжены.
Подключить питание к контроллеру полета, для инициализации и калибровки.
После соединения с GPS, переключится в полностью автоматический режим (Alt. + Att. Hold).
Сесть в кресло пилота и пристегнутся.
Подключите все батареи к ESC.
Соедините две батареи последовательно (ESC-RB-RB-ESC) с использованием резистора для устранения искры.
Включите моторы, повернув переключатель в положение «включено».
С помощью контроллера управляете октокоптером.